 Dr
Daniel Bisig Dr
Daniel BisigJoshua Bongard Dale Thomas AILab - IFI [ Interview du mercredi 20 novembre 2002 entre 12:00-14:00 ]
Le Laboratoire d’Intelligence Artificielle de l’Institut d’Informatique se situe dans le bâtiment 27 de l’Université de Zurich. Il a été fondé en 1987 par le professeur Rolf Pfeifer, dont équipe ne se contente pas de développer des algorithmes sophistiqués pour imiter l’intelligence humaine. L’expérience a montré qu’il fallait plus que cela pour arriver à créer des robots super intelligents. Le concept de comprendre en construisant a été défini, mettant en évidence la nécessité de concevoir le corps du robot en même temps que son cerveau. Ainsi la relation entre matériel et logiciel est au centre du processus de développement et force l’ingénieur à utiliser des outils adaptés à cette poursuite. L’un de ces outils est la simulation, faisant appel à des concepts d’évolution artificielle, régulés par des fonctions de conformité. Evidemment, l’inspiration de départ vient de la nature, de l’évolution de l’être humain, mais aussi des insectes, de la mouche pour ses yeux multi-facettes, et des fourmis pour leur comportement collectif. L’inspiration, selon le Dr Daniel Bisig, peut aussi venir de la chimie dont les règles permettent de mettre en place toute une logique basée sur les structures des molécules et de leur interactivité.
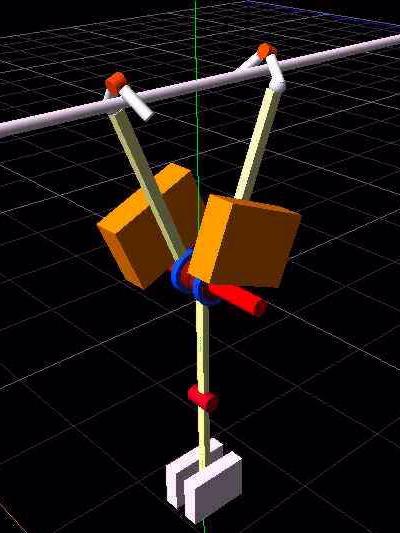
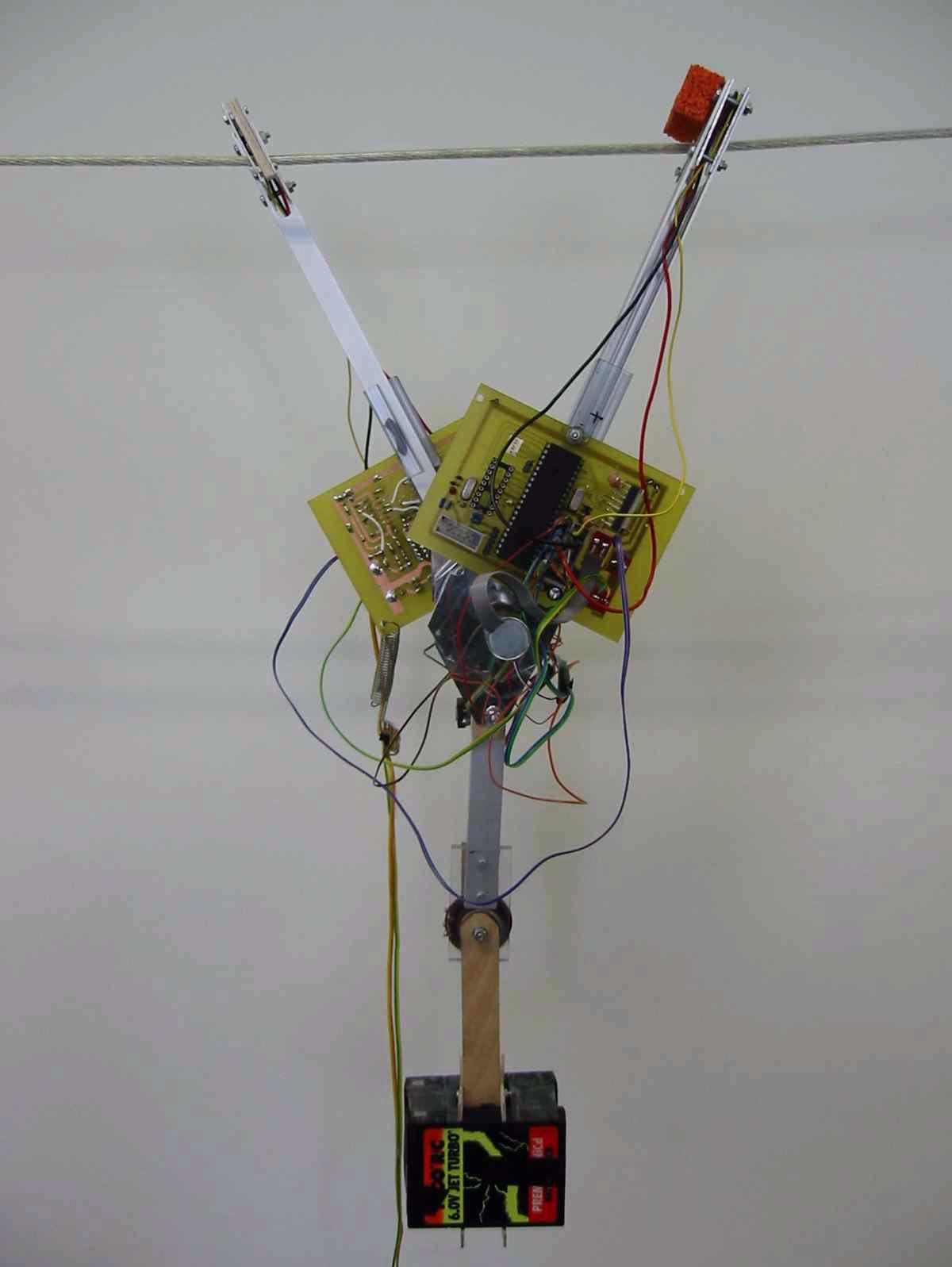
Le programme MorphEngine a été utilisé pour concevoir un robot suspendu, simulant un singe accroché à une branche et mis en mouvement par un seul actuateur placé en son centre. Le programme de simulation permet de tester le principe et de répartir les masses et les capteurs impliqués dans la structure, afin d’obtenir un mouvement régulier se traduisant par l’avance du prototype le long du fil. Ensuite, utilisant les données obtenues, un vrai robot « en chair et en os » a été réalisé, montrant la réalité du comportement généré. L’optimalisation de ce robot a alors été possible en retournant à la simulation pour y inclure les observations du monde réel. Ainsi, par la réalisation du prototype, la conception a pu être revue et corrigée.
L’AILab collabore au projet européen de recherche Hydra, auxquelles participent les universités danoises d’Odense et d’Aarthus, l’université d’Edinburgh et la compagnie danoise Lego, constructeur des célèbres briques. De futurs robots jouets en perspective… Pour en savoir
plus : OW|BR – Mb22 |
||||